utworzone przez | | Roboty liniowe
T portal liniowy dwu-osiowy ELZI Elektryczny portal liniowy XZ, dwu-osiowy, jedno-paskowy. 3 grupy wielkości profili aluminiowych 30, 40, 60. Dokładność pozycjonowania ±0,1mm. Max. prędkość liniowa 5m/s. Ruch realizowany jest za pomocą dwóch silników....
utworzone przez | | Roboty liniowe
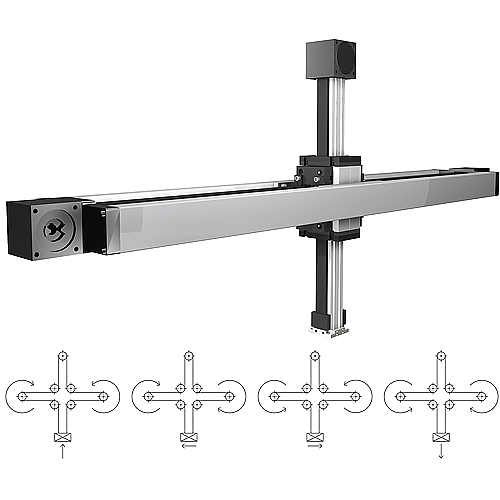
H portal liniowy dwu-osiowy ELZU Elektryczny napęd liniowy dwu-osiowy, jedno-paskowy, portal liniowy typu H. 7 grup wielkości profili aluminiowych. Max. długość i szerokość portalu 3000mm. Dokładność pozycjonowania 0,1 mm. Prędkość liniowa max. 6m/s....
utworzone przez | | Roboty liniowe
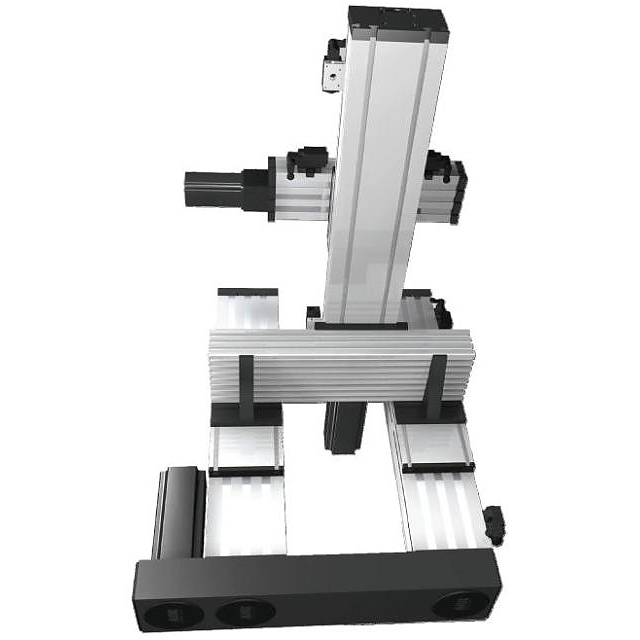
Liniowy robot kartezjański 2-osiowy ELZ/ELSZ 2 osiowy kartezjanski robot liniowy zbudowany na elektrycznych napędach liniowych paskowych ELZ/ELSZ firmy Bahr z prowadnicami rolkowymi wózka. Z elektrycznymi silnikami – serwosilnikami i serwonapędami...
utworzone przez | | Roboty liniowe
Liniowy robot kartezjański 3-osiowy QSK/DSK Trzy osiowy precyzyjny, przemysłowy, liniowy robot kartezjański XYZ. W zakresie ruchu 900x900x300. Prędkość liniowa max. 0,5m/s. Zbudowany na elektrycznych napędach liniowych śrubowych z gwintem kulowym. Precyzja...
utworzone przez | | Roboty liniowe
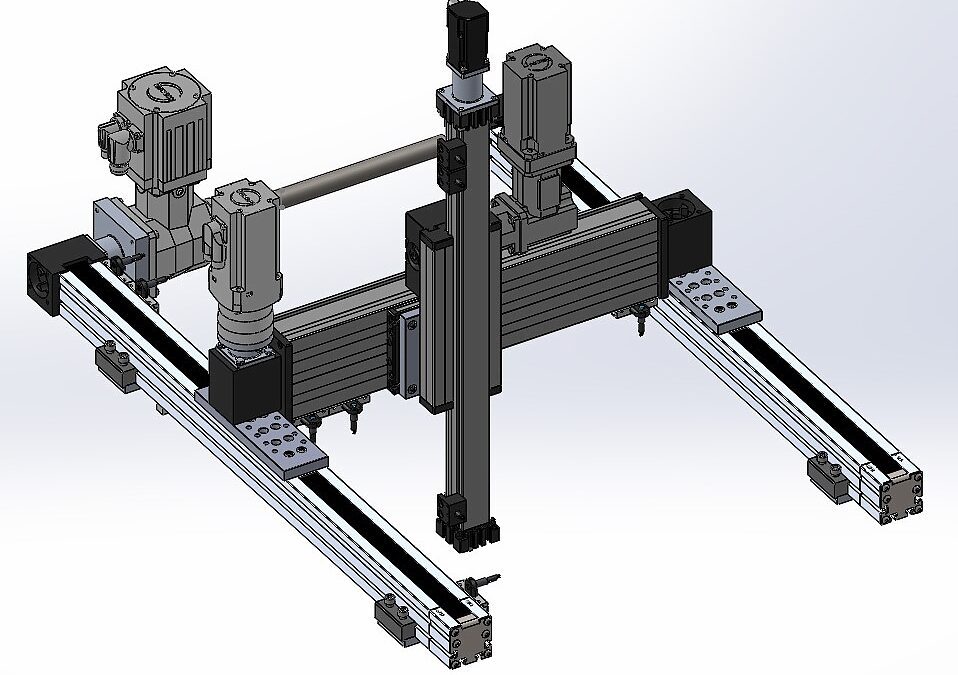
Robot kartezjański 4-osiowy DST/DSK-DLT/DLK 4 osiowy kartezjanski robot liniowy BAHR zbudowany na elektrycznych napędach liniowych śrubowych DST/DSK z prowadnicami szynowymi lub rolkowymi wózka. Do wyboru śruby z gwintem kulowym lub trapezowym. Wykonanie...
utworzone przez | | Roboty liniowe
4 osiowy robot kartezjański XYZO 4 osiowy robot kartezjański XYZO Przemysłowy robot kartezjański 4osiowy XYZO dla różnych zadań przemysłowych np pakowanie, segregowanie, grawerowanie, układanie, odbieranie, wiercenie, pick and place i inne Zobacz więcej z...