Portal liniowy ELZI dwu-osiowy

Układ XZ przemieszczeń liniowych, dwu-osiowy, jedno-paskowy. 3 grupy wielkości profili aluminiowych 30, 40, 60. Dokładność pozycjonowania 0,1mm. Max. prędkość liniowa 5m/s. Ruch realizowany jest za pomocą dwóch silników. Zastosowania: szybkie, krótkie posuwy.
Portal liniowy ELZI dwu-osiowy
![]()
- Portal X / Z, który składa się z podwójnej prowadnicy w poziomej płaszczyźnie X i pionowej osi Z.
- Pasek zębaty jest zamocowany i napięty na końcu obciążenia osi Z.
- Napęd jest wytwarzany przez pas cyrkulacyjny, który przebiega przez różne punkty odchylenia.
- Regulacja odbywa się za pomocą dwóch silników.
- Współrzędne dla pozycjonowania leżą ukośnie względem punktów ugięcia osi X i Z.
- Zaleta: tylko małe masy są przemieszczane, dzięki czemu osiągają wysokie przyspieszenia.



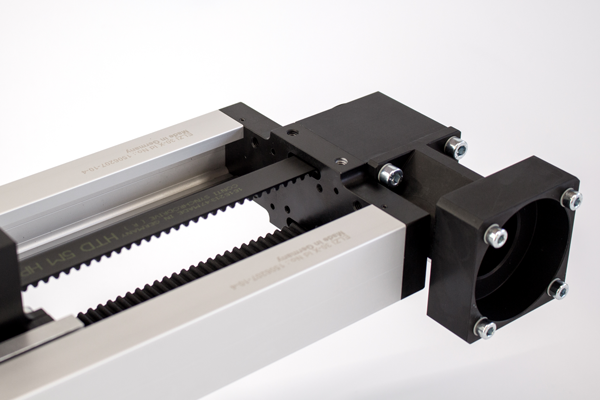
Tabela T portali liniowych dwu-osiowych ELZI
| TYP | ELZI30 | ELZI40 | ELZI60 |
| Max. prędkość liniowa (m/s) | 2 | 4 | 5 |
| Dokładność pozycjonowania (mm) | ± 0,5 | ± 0,5 | ± 0,5 |
| Max. siła dynam. Fx (N) | 350 | 800 | 1800 |
| Max. siła dynam. Fz (N) | 160 | 900 | 1200 |
| Max. momenty skręcające wózka Mx (Nm) | 9 | 20 | 43 |
| Max. momenty skręcające wózka My (Nm) | 13 | 22 | 70 |
| Max. momenty skręcające wózka Mz (Nm) | 18 | 25 | 100 |
| Moment obrotowy biegu jałowego (Nm) | 2 x 0,4 | 2 x 0,6 | 2 x 1,1 |
| Max.siła ciągu paska (N) | 360 | 894 | 1900 |
| Typ paska zębatego | 5M15 | 5M25 | 8M30 |
| Obwód koła pasowego (mm/obr) | 120 | 160 | 224 |
| Max. prędkość obrotowa (obr/min) | 1000 | 1500 | 1400 |
| Standardowa długość wózka (mm) | 144 | 165 | 235 |
| Rozmiar wału wejściowego | 10 h6 x27 | 14 h6 x35 | 22 h6 x45 |
Szeroki wybór akcesoriów portali liniowych dwu-osiowych ELZI:
- adapter przekładni, silnika
- sprzęgło
- przekładnia
- serwosilnik
- krańcówka
- profile montażowe
- wpsuty przesuwne – nakrętki teowe
Katalogi
ELZI_INSTRUCTION.pdf – Instrukcja obsługi 2-osiowego T robota ELZI jednopaskowego w j.angielskim
ELZI_EN.pdf – strona katalogowa 2-osiowego T portalu liniowego ELZI w j. angielskim
ACCESSORIES_EN.pdf – Akcesoria napędów liniowych i prowadnic liniowych Bahr
Faxanfragen.pdf – Formularz zapytania o napędy i prowadnice liniowe Bahr