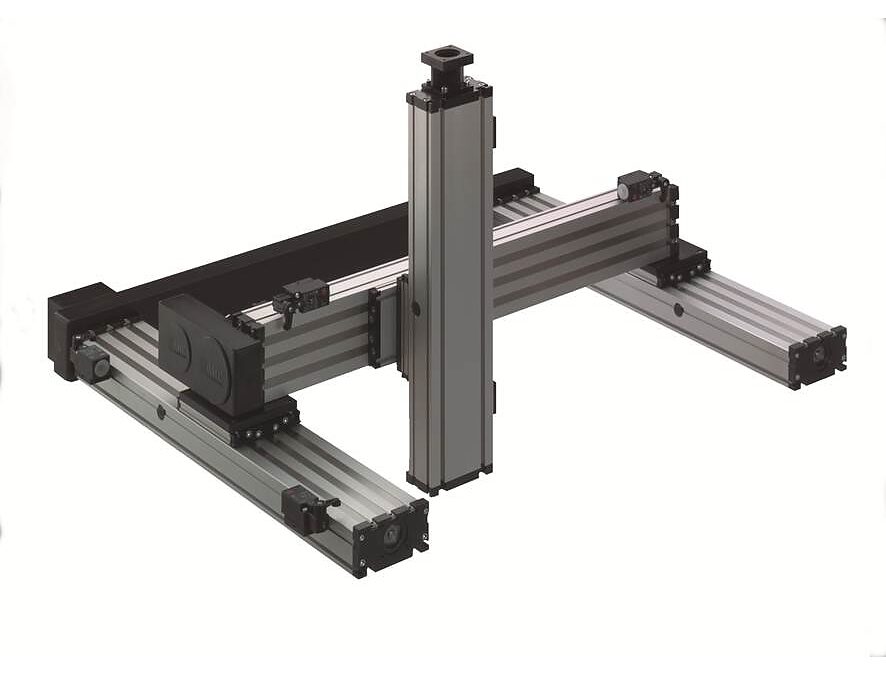
? ? ? ? ? Robot kartezjański 3-osiowy 3DSK 3-osiowy portal liniowy oparty o liniowe prowadnice szynowe z napędami śrubowymi, śruby z gwintem kulowym. Dokładność pozycjonowania +/-0,05mm lub +/-0,025mm Zobacz więcej z tej kategorii Zapytaj o produkt TRZY OSIOWY ROBOT...
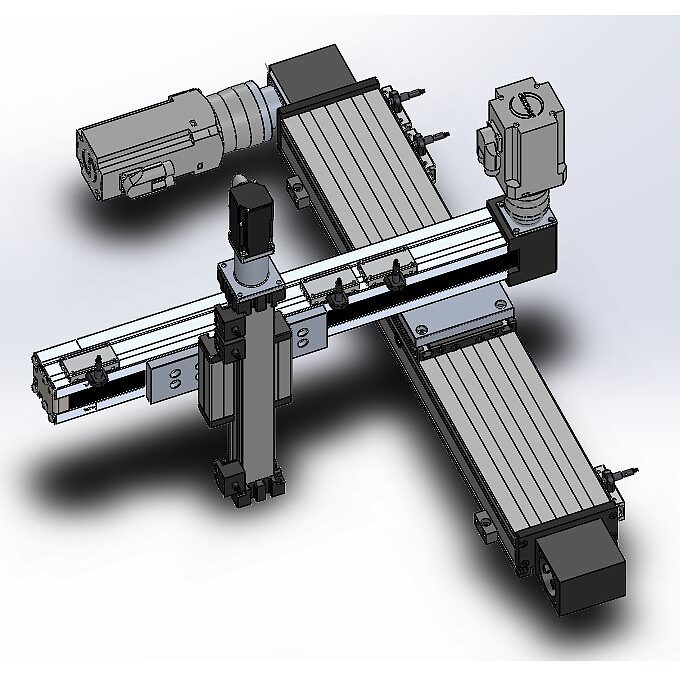
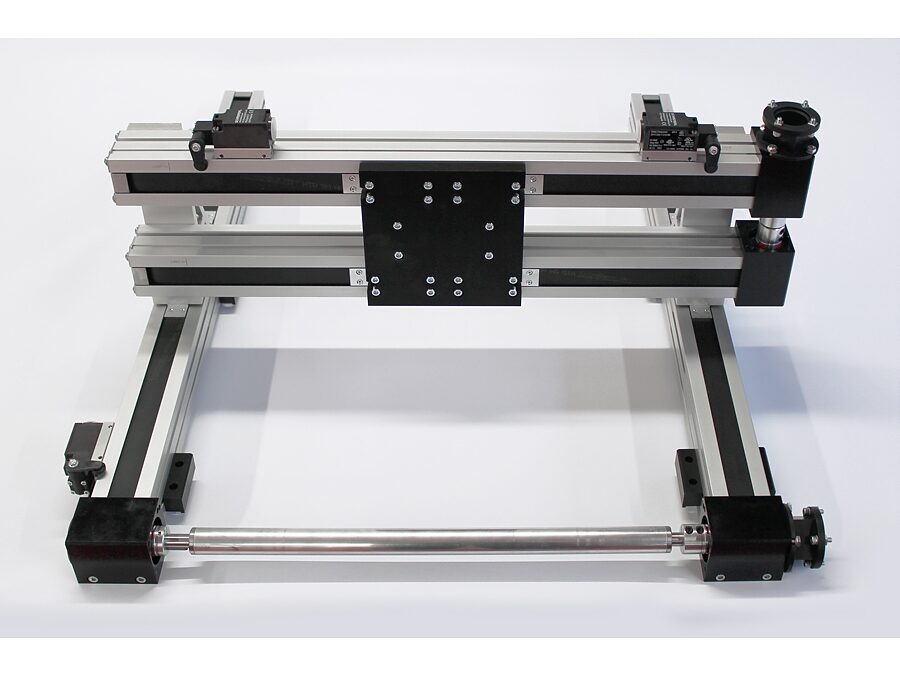
3 osiowy robot kartezjański XYZ 3 osiowy robot kartezjański XYZ Trzy osiowy przemysłowy robot kartezjański XYZ typu pick and place, jednoramienny bez podparcia osi poprzecznej Zobacz więcej z tej kategorii Zapytaj o produkt 3 OSIOWY PRZEMYSŁOWY ROBOT...
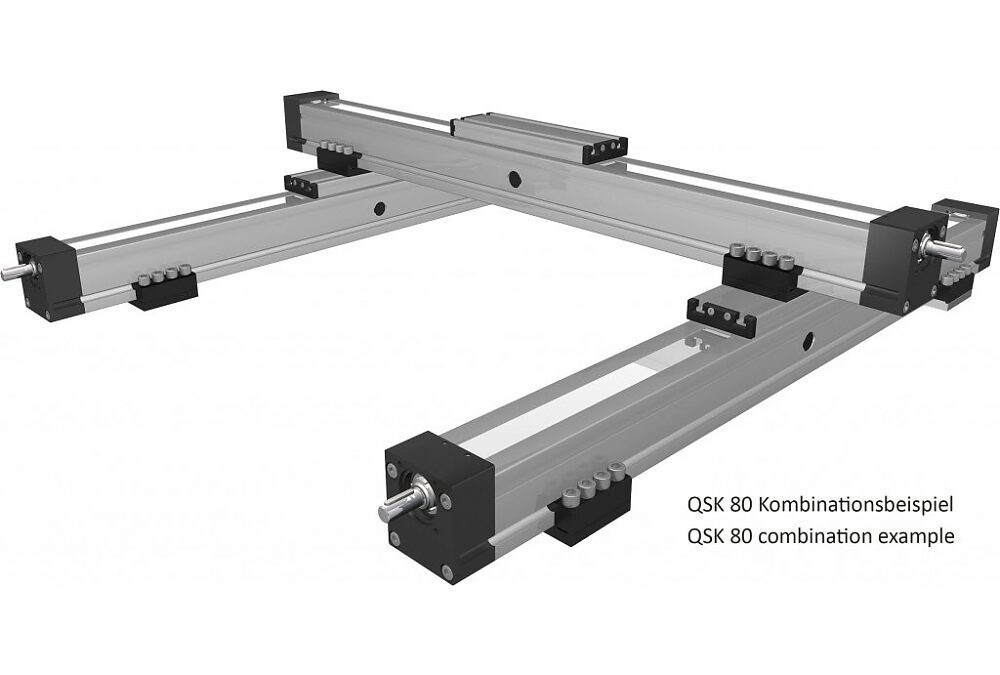
? ? ? ? ? 3 osiowy robot kartezjański XYZ Trzy osiowy przemysłowy robot kartezjański XYZ typu pick and place, jednoramienny bez podparcia osi poprzecznej Zobacz więcej z tej kategorii Zapytaj o produkt 3 OSIOWY PRZEMYSŁOWY ROBOT KARTEZJAŃSKI dwie osie liniowe XY na...