Portale liniowe wielo-osiowe IMI Bahr
Portal liniowy 2-osiowy ELZI
Układ XZ przemieszczeń liniowych, dwu-osiowy, jedno-paskowy. 3 grupy wielkości profili aluminiowych 30, 40, 60. Dokładność pozycjonowania 0,1mm. Max. prędkość liniowa 5m/s. Ruch realizowany jest za pomocą dwóch silników. Zastosowania: szybkie, krótkie posuwy. Opcjonalnie wykonanie antykrozyjne. Akcesoria: adpter, sprzęgło, przekładnia, serwosilnik.

Portal liniowy 2-osiowy ELZU
Portal liniowy dwu-osiowy, jednopaskowy, portal liniowy typu H. Liniowy portal ganrty, powierzchniowy. 7 grup wielkości profili aluminiowych od 30 do 100mm. Max. długość i szerokość portalu liniowego 3000mm. Dokładność pozycjonowania 0,1 mm. Prędkość liniowa max. 6m/s. Przyspieszenia max. do 20m/s. Opcjonalnie wykonanie antykorozyjne.

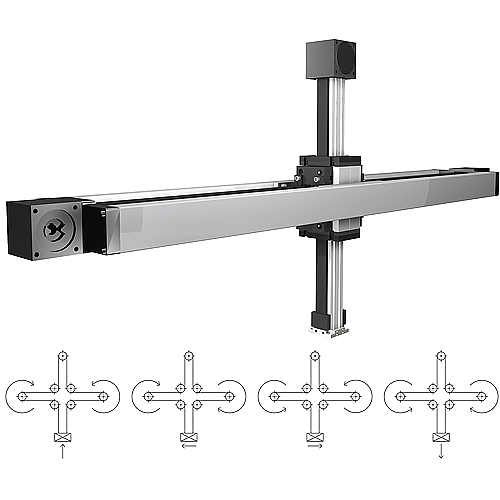
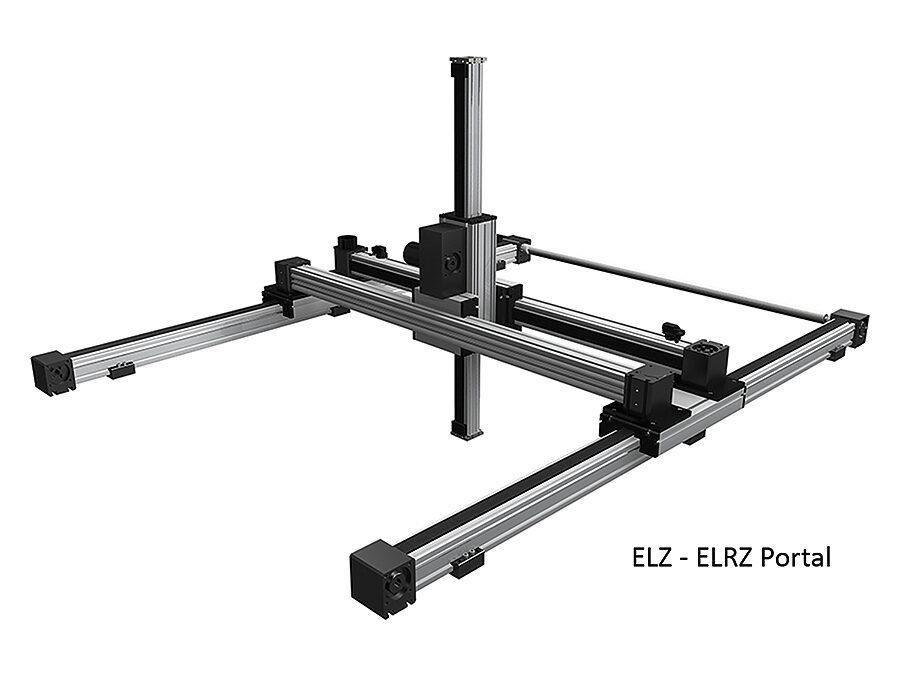
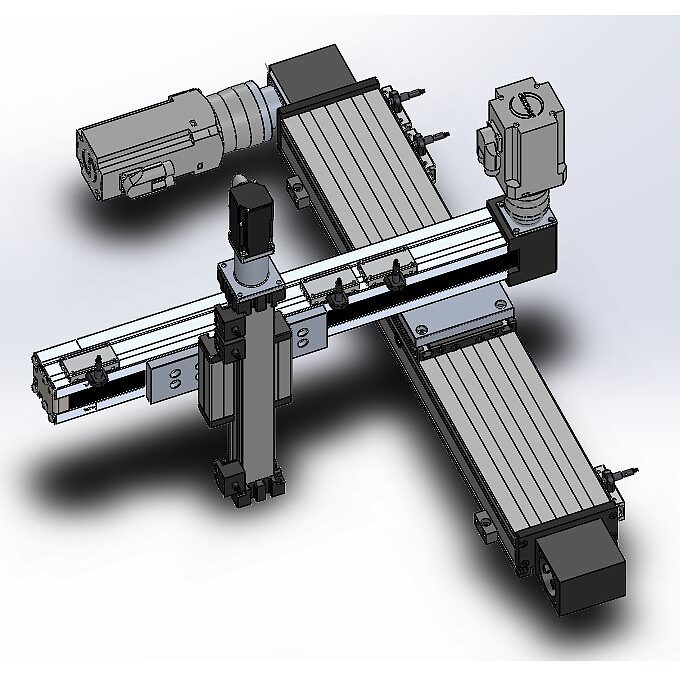
Portal liniowy 2-osiowy XZ
Liniowy robot kartezjanski dwu-osiowy XZ na napędach liniowych paskowych ELZ/ELSZ. Z podwójnymi osiami liniowymi do przenoszenia długich detali i dużych obciążeń. Dokładność pozycjonowania 0,1mm. Napędy liniowe paskowe z prowadnicami liniowymi rolkowymi. Opcjonalnie wykonanie antykrozyjne. Do pracy w każdych warunkach.

Portal liniowy 3-osiowy QSK/DSK
Liniowy robot kartezjański 3-osiowy QSK/DSK z napędami liniowymi śrubowymi, serwonapędami Stober, komunikacją EtherCAT/ProfiNET. Precyzja pozycjonowania 0,05 mm. Prędkosć liniowa max. 0,5 m/s. Zakres ruchu w osi X 900mm, w osi Y 900mm i w osi Z 300mm. Wykonanie bryzgoszczelne i kurzoszczelne, Opcjonalnie antykorozyjne.
Robot kartezjański 4-osiowy DST/DSK
4 osiowy kartezjanski robot liniowy BAHR zbudowany na elektrycznych napędach liniowych śrubowych DST/DSK-DLT/DLK z prowadnicami szynowymi lub rolkowymi wózka. Do wyboru śruby z gwintem kulowym lub trapezowym. Wykonanie bryzgoszczelne i odporne na kurz. Z elektrycznymi silnikami – serwosilnikami i serwonapędami. Szeroki wybór akcesoriów: czujniki, adaptery, sprzęgła, płyty montażowe. Dowolna konfiguracja.
Robot kartezjański 4-osiowy
4 osiowy kartezjanski robot liniowy BAHR zbudowany na elektrycznych napędach liniowych paskowych z prowadnicami rolkowymi wózka i osią obrotową. Z elektrycznymi silnikami – serwosilnikami i serwonapędami. Szeroki wybór akcesoriów: czujniki, adaptery, sprzęgła, płyty montażowe. Dowolna konfiguracja. Opcjonalnie wykonanie antykorozyjne.
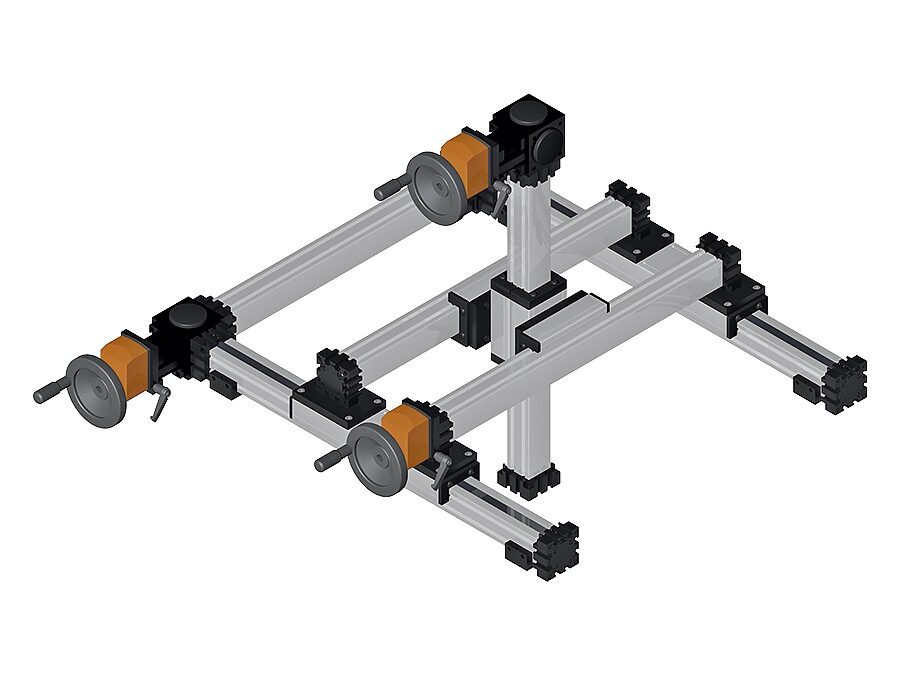
Portal liniowy 3-osiowy XYZ
3 osiowy liniowy robot kartezjański XYZ firmy Bahr z napędami śrubowymi, z pokrętłami ręcznymi
Portal liniowy 3-osiowy ELZ/ELSZ
3 osiowy kartezjanski robot liniowy zbudowany na elektrycznych napędach liniowych paskowych ELZ/ELSZ firmy Bahr z prowadnicami rolkowymi wózka. Z elektrycznymi silnikami – serwosilnikami i serwonapędami firmy Stober. Prędkosci liniowe max. 1 m/s. Dokładnosć pozycjonowania 0,1mm. Szeroki wybór akcesoriów. Dowolna konfiguracja. Opcjonalnie wykonanie antykorozyjne.

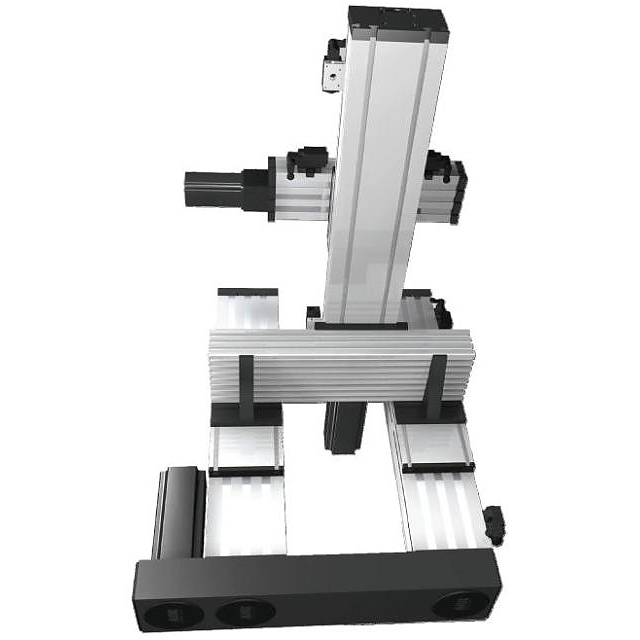
Portal liniowy 3-osiowy QSZ/DSSZ
3 osiowy kartezjanski robot liniowy BAHR zbudowany na elektrycznych napędach liniowych paskowych QSZ/DSSZ z prowadnicami szynowymi wózka. Z elektrycznymi silnikami – serwosilnikami i serwonapędami. Szeroki wybór akcesoriów: czujniki, adaptery, sprzęgła, płyty montażowe. Dowolna konfiguracja. Opcjonalnie wykonanie antykorozyjne.
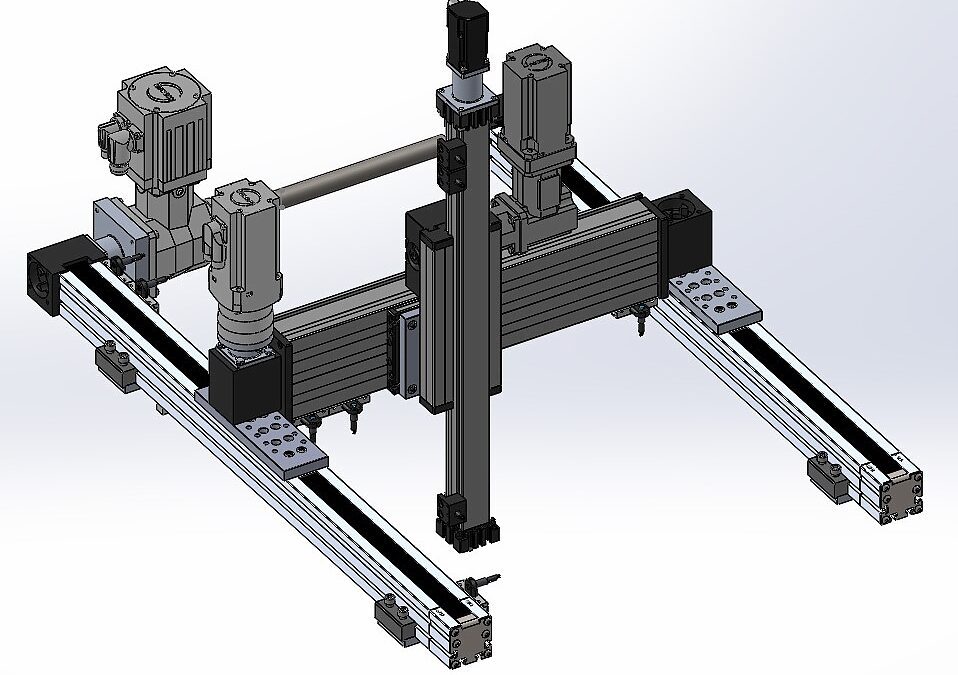
Portal liniowy 3-osiowy XYZ
Robot liniowy kartezjański 3-osiowy XYZ, jednoramienny bez podparcia osi poprzecznej w wykonaniu przemysłowym. Portal liniowy 3-osiowy zbudowany na prowadnicach liniowych z napędami liniowymi paskowymi DSZ i śrubowymi ELT/ELK. Serwonapędy i sterowanie firmy Stober. Przekładnie bezpośrednio zabudowane na serwosilnikach bez adaptera i sprzęgła zyskują na kompaktowym wymiarze i wadze.