utworzone przez | | Portale liniowe
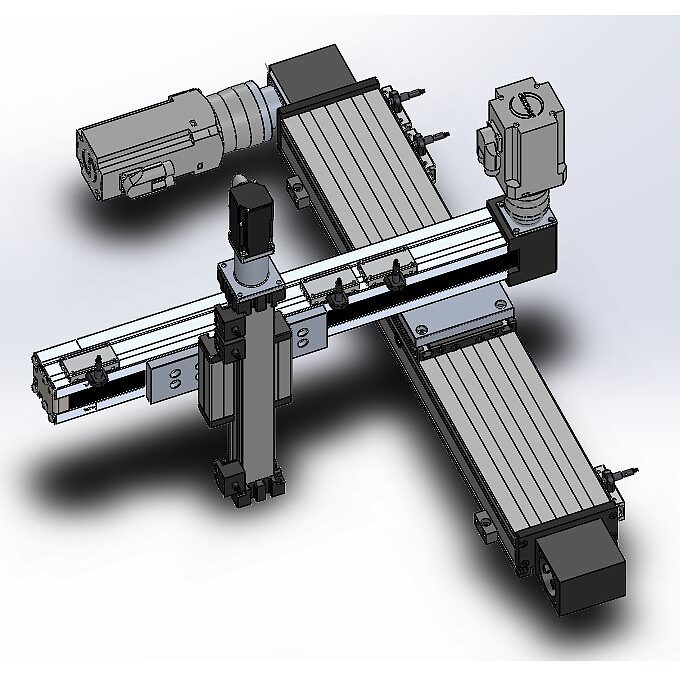
3 osiowy liniowy robot kartezjański QSZ/DSSZ 3 osiowy robot kartezjański XYZ oparty na paskowych napędach liniowych QSZ/DSSZ z liniowymi prowadnicami szynowymi wózka. Wysoka sztywność liniowa, powtarzalność ruchów +/-0,1mm. max.prędkość liniowa 6m/s. Zobacz...
utworzone przez | | Portale liniowe
Portal liniowy 3 osiowy XYZ Trzy osiowy przemysłowy robot kartezjański XYZ typu pick and place, jednoramienny bez podparcia osi poprzecznej. Portal liniowy 3-osiowy zbudowany na prowadnicach liniowych z napędami paskowymi i śrubowymi. Przekładnie...
utworzone przez | | Portale liniowe
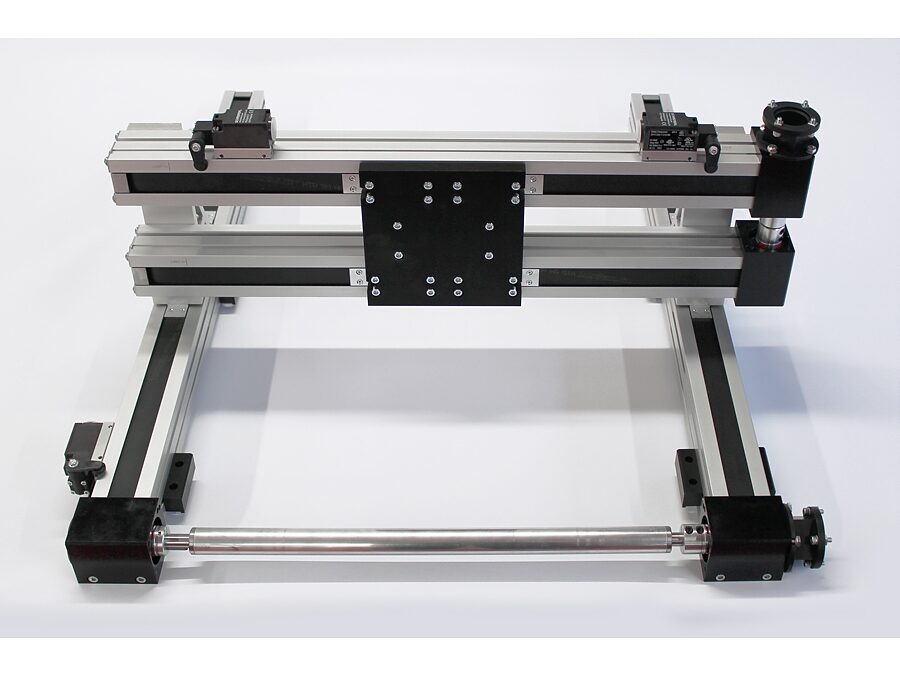
Robot kartezjański 2-osiowy XY 2 osiowy robot kartezjański oparty na paskowych napędach liniowych LLZ/LSZ z liniowymi prowadnicami szynowymi lub rolkowymi wózka. Wysoka sztywność liniowa, powtarzalność ruchów +/-0,1mm. max.prędkość liniowa 4m/s....
utworzone przez | | Portale liniowe
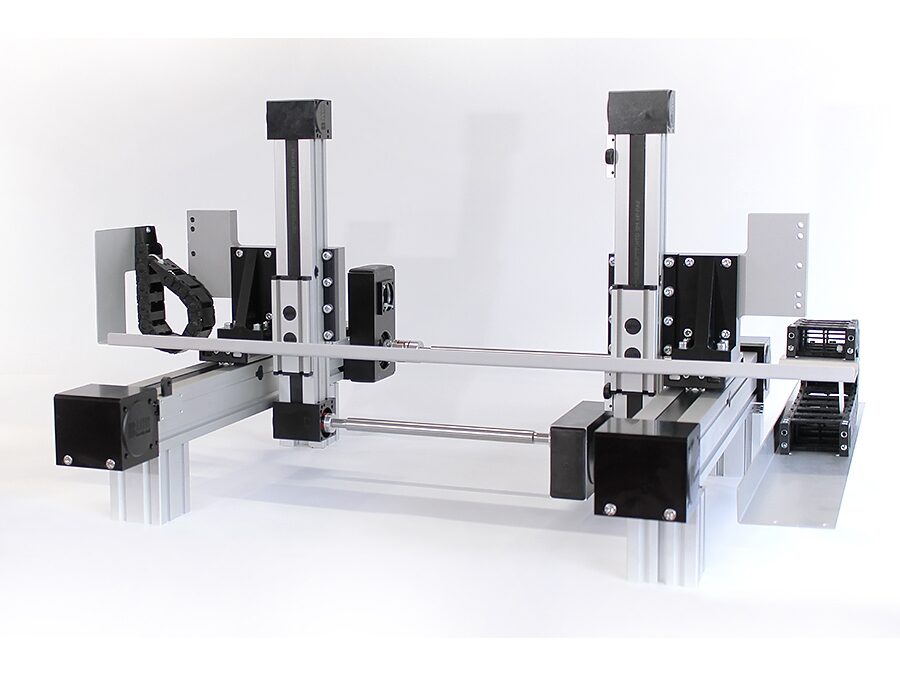
Portal liniowy 2-osiowy DSK/DST 2 osiowy XY liniowy robot kartezjański DSK/DST. Napędy liniowe śrubowe DSK z gwintem kulowym do pracy ciągłej i dynamicznej z wysoką pracyzją, natomiast DST z gwintem trapezowym do pracy dorywczej. Prowadnice liniowe szynowe...
utworzone przez | | Napędy liniowe, Portale liniowe
Portal liniowy 2-osiowy QLZ Portal liniowy 2-osiowy XZ w wykonaniu przemysłowym z podwójnymi napędami liniowymi paskowymi QLZ dla dynamicznego przenoszenia długich detali. Synchronizacja mechaniczna osi pionowych Z i osi poziomych X sprzęgłem dystansowym...