utworzone przez | | Napędy liniowe, Portale liniowe
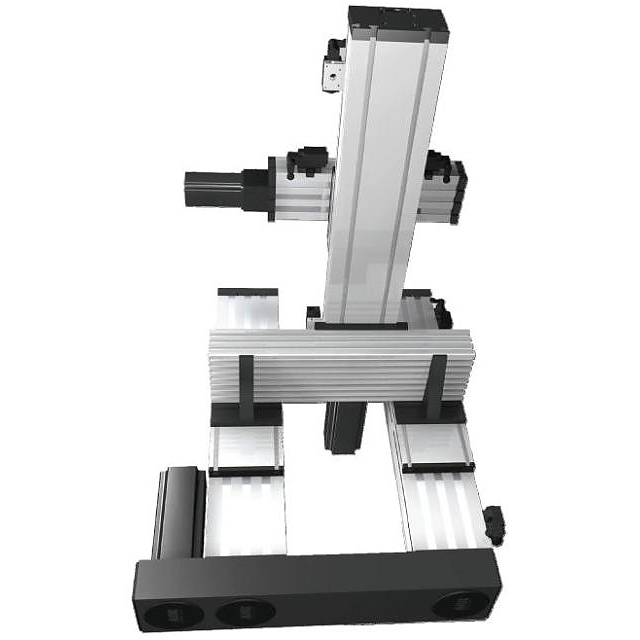
Robot kartezjański 4-osiowy DST/DSK-DLT/DLK 4 osiowy kartezjanski robot liniowy BAHR zbudowany na elektrycznych napędach liniowych śrubowych DST/DSK z prowadnicami szynowymi lub rolkowymi wózka. Do wyboru śruby z gwintem kulowym lub trapezowym. Wykonanie...
utworzone przez | | Napędy liniowe śrubowe
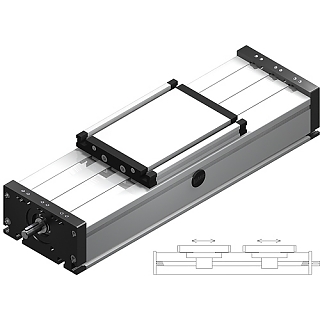
Napęd liniowy śrubowy DLT/DLK Podwójna, wewnętrzna prowadnica liniowa rolkowa wózka z napędem śrubowym i gwintem kulowym DLK lub trapezowym DLT. 3 grupy wielkości profili aluminiowych 120×60, 160×80 i 200×100. Siła posuwu max. 10 kN....