Pozycjonowanie blokowe w serwonapędach
Sterowanie pozycją wału silnika
Nowa seria sterowników napędów Stober składa się z serwonapędów SD6, i dwu-osiowych SC6 oraz SI6.
Serwonapędy SD6 charakteryzuje się modułową budową, która umożliwia montaż kart opcjonalnych komunikacyjnych oraz I/O. Dodatkowo możliwa jest komunikacja przemysłowa Profinet, EtherCAT oraz CAN. Kartą wejścia/ wyjścia może być podstawowa IO6, rozbudowana Xi6 oraz do obsługi resolvera Ri6. Serwonapęd ten umożliwia sterowanie jednym podłączonym silnikiem. Występuje on w podstawowym wariancie safety STO lub wariancie rozbudowanym, który obsługuje więcej funkcji safety. Nowa seria obsługuje aplikacje CIA402 oraz własną aplikację Stober – Drivebased.
Nowsze sterowniki napędów występujące w wariancie dwuosiowym to SI6 oraz SC6.
SI6 do działania potrzebuje zasilacza (prostownika) PS6, natomiast SC6 ma już wbudowany zasilacz. Oba typy charakteryzują się kompaktową budową. Wbudowaną komunikacją jest Profinet oraz EtherCAT. Zmiana aktualnej komunikacji jest możliwa, ale we własnym zakresie przez zmianę firmware. Każdy napęd ma 8 wejść cyfrowych oraz posiada sterowanie hamulca silnika. Występuje również kilka wersji funkcji bezpieczeństwa STO przez zaciski, Profisafe oraz FSoE (Safety over EtherCAT). Nowszy typ obsługuje aplikacje Profidrive oraz CIA402 oraz własną aplikację Stober – Drivebased.
Aplikacja Drivebased w serwonapędach Stober
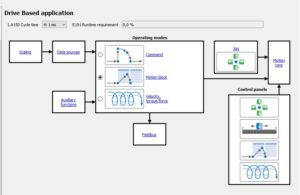
Teraz dokładniej omówimy aplikację Drivebased firmy Stober, która dostępna jest w omawianych wyżej serwonapędach. Parametryzacja odbywa się w darmowej aplikacji DS6 – Drive control suite. Aplikacja składa się z trzech trybów pracy: pozycjonowania komendowego (command), pozycjonowania blokowego (motion block) oraz sterowania prędkością/momentem (velocity/torque). Poniżej zostanie przedstawiona aplikacja pozycjonowania blokowego.
Aplikacja składa się z zaprogramowanych bloków (komórek). Ich liczbę możemy sami zdefiniować. Każdemu blokowi możemy nadać nazwę i wybrać komendę widoczną w liście dostępnych komend. Odpowiadają one międzynarodowemu standardowi PLC open. Czyli przykładowo możemy wybrać MC_MoveAbsolute, MC_MoveVelocity, MC_Stop, MC_Home oraz inne. Komendy są powszechnie znane, a standard PLC open jest powszechnie stosowany. Po wybraniu komendy pojawiają się odpowiednie parametry, które należy sparametryzować. Komendy pozycjonowania wymagają wprowadzenia pozycji docelowej oraz dynamiki jej osiągnięcia. Dzięki precyzyjnym przekładniom pozycjonowanie jest powtarzalne oraz precyzyjne. Komendy prędkościowe mają wartość zadaną prędkości oraz rampy przyspieszenia. Komenda MC_Home wykonuje zaprogramowaną procedurę bazowania. MC_Stop wykona zatrzymanie po zaprogramowanej rampie stopu. Możemy zaprogramować sekwencję wykonywanych po sobie bloków czy przerwania (triggery) które przełączą aktualnie wykonywany blok na kolejny, w zależności od warunku. Warunkiem może być warunek czasowy (opóźnienie) lub sygnał cyfrowy. Możemy również stworzyć funkcję porównującą (comparator) jeśli warunek jest spełniony to następuje aktywacja przełączenia.
Zaletą wyboru tej aplikacji jest możliwość szybkiego wyzwolenia ruchu przez uruchomienie bloku. Uruchomienie bloku może być zainicjowane poprzez wejście cyfrowe lub za pomocą komunikacji przemysłowej. Nie ma potrzeby przesyłania dużej ilości danych po sieci przemysłowej, dzięki czemu może ona działać szybciej. Wystarczy wystawić sygnał cyfrowy ze sterownika PLC lub wysłać numer bloku oraz sygnał startu.
Bezpłatna aplikacja do obsługi serwonapędów Stober
Darmowa aplikacja DS6 oraz wbudowane bloki/funkcje PLC open pozwalają oszczędzić na licencjach w PLC. Nie musimy płacić za funkcje motion ponieważ są one dostępne w serwonapędach. Dodatkowymi atutami są przejrzysty interface programu oraz dostęp do helpa oraz polskiej instrukcji obsługi serwonapędów. Ponadto firma Demero oferuje szeroki zakres wsparcia w doborze odpowiednich komponentów, prowadzi szkolenia z obsługi oraz programowania, a także wykonuje przykładowe aplikacje.
