utworzone przez | | Portale liniowe
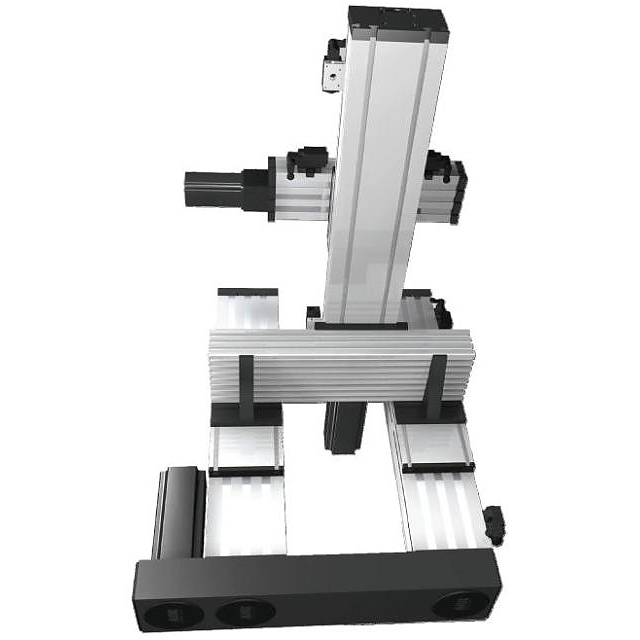
Robot kartezjański 4-osiowy DST/DSK-DLT/DLK 4 osiowy kartezjanski robot liniowy BAHR zbudowany na elektrycznych napędach liniowych śrubowych DST/DSK z prowadnicami szynowymi lub rolkowymi wózka. Do wyboru śruby z gwintem kulowym lub trapezowym. Wykonanie...