Komendy ruchu PLCopen w serwonapędach Stober

PLCopen jest wiodącym światowym stowarzyszeniem niezależnych dostawców i produktów zajmującym się tematami związanymi z programowaniem sterowania przemysłowego. Standard ten jest wspierany przez wielu producentów automatyki. Od wielu lat również #Stober Antriebstechnik wspiera ten standard. Dzięki temu automatycy mogą łatwiej odnaleźć się w programowaniu na nowym urządzeniu. Skraca się czas na uruchomienie oraz modernizacje maszyny. Tym samym obniża się koszt oraz zwiększa wydajność. Dodatkowym atutem jest możliwość łatwego przejścia na nowe typy serwonapędów, nawet innego producenta, które obsługują opisywany standard PLCopen. Im więcej obsługiwanych komend tym więcej możliwości ma programista. Starsze typy serwonapędów mogą nie obsługiwać wszystkich komend. Dlatego warto sprawdzać co mają do zaoferowania nowe typy serwonapędów. Standard PLCopen jest cały czas wspierany i rozwijany. Poniżej krótka prezentacja komend ruchu dostępna w najnowszych serwonapędach SD6, SC6/SI6 firmy #Stober, które spełniają standard #PLCopen.
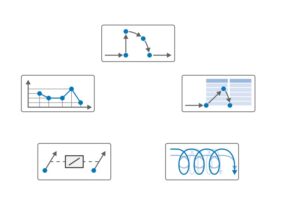
W najnowszej wersji oprogramowania Drive Control Suite 6.5-E możemy uruchomić następujące komendy ruchu.
Motion Command DoNothing
0: MC_DoNothing – Specyficzne dla producenta polecenie dla ustawień domyślnych
Motion Command MoveAbsolute
1: MC_MoveAbsolute – Oś przesuwa się do pozycji bezwzględnej (konieczne odniesienie/referowanie)
Motion Command MoveRelative
2: MC_MoveRelative – Oś porusza się na odległość względną; ustawiona pozycja odnosi się do aktualnej pozycji na początku polecenia
Motion Command MoveAdditive
3: MC_MoveAdditive – Oś porusza się na odległość względną; pozycja ustawiona jest względem pozycji ustawionej w poprzednim poleceniu ruchu
Motion Command MoveVelocity
4: MC_MoveVelocity – Oś porusza się bez końca z ustawioną prędkością (sterowanie prędkością z kontrolą położenia)
Motion Command Stop
5: MC_Stop – Oś zostaje zatrzymana; następne polecenie ruchu może być wykonane po zatrzymaniu
Motion Command Home
6: MC_Home – Oś jest referowana
Motion Command CyclicSpeed
7: MC_CyclicSpeed – oś porusza się bez końca z zadaną prędkością (ruch sterowany sterownikiem)
Motion Command MoveSpeed
8: MC_MoveSpeed – Oś porusza się bez końca z ustawioną prędkością (sterowanie prędkością bez kontroli położenia)
Motion Command TorqueControl
9: MC_TorqueControl – Oś porusza się bez końca z ustawionym momentem/siłą
Motion Command Halt
11: MC_Halt – Oś jest zatrzymana; następne polecenie ruchu może być wykonane przed zatrzymaniem
Motion Command GearIn
12: MC_GearIn – Oś porusza się synchronicznie z masterem; sprzęgło oparte na prędkości (przekładnia elektroniczna)
Motion Command GearOut
13: MC_GearOut – Oś kończy bieżący ruch synchroniczny i kontynuuje z ostatnią prędkością synchroniczną (przekładnia elektroniczna)
Motion Command GearInPosition
14: MC_GearInPosition – Oś porusza się synchronicznie z masterem; sprzęgło pozycyjne (przekładnia elektroniczna)
Motion Command CamIn
15: MC_CamIn – Oś porusza się synchronicznie z masterem; sprzężenie oparte na prędkości (elektroniczna tarcza krzywkowa)
Motion Command CamInAbsolute
16: MC_CamInAbsolute – Oś porusza się synchronicznie z masterem; sprzężenie pozycyjne (elektroniczna tarcza krzywkowa)
Motion Command CamOut
17: MC_CamOut – Oś kończy bieżący ruch synchroniczny i kontynuuje z ostatnią prędkością synchroniczną (elektroniczna tarcza krzywkowa)
Motion Command CyclicSpeed
18: MC_CyclicSpeed – Oś porusza się bez końca z zadaną prędkością (ruch sterowany przez sterownik)
Motion Command CyclicPosition
19: MC_CyclicPosition – Oś porusza się bez końca z zadaną pozycją (ruch sterowany przez sterownik)
W serwonapędach SD6/SI6/SC6 firmy Stober mamy dwie możliwości programowania w trybie pozycjonowania: komendowe pozycjonowanie lub blokowe pozycjonowanie. Komendowe przeznaczone jest dla komunikacji przemysłowej ze sterownikiem PLC: Profinet lub Ethercat. Blokowe przeznaczone do sterowania za pomocą wejść/wyjść cyfrowych serwonapędów. Jeżeli chcemy sterować prędkością lub momentem to jest też aplikacja szybkiej wartości zadanej. Serwonapęd SD6 cechuje się sterowaniem dla jednego silnika w odróżnieniu do SC6/SI6, które mogą być również dwuosiowe. Modułowa budowa SD6 sprawia, że można wyposażyć go w dodatkowe karty komunikacji przemysłowej: CAN, EtherCAT, Profinet oraz jedną z trzech dostępnych kart rozszerzeń I/O. Serwonapęd SD6 poosiada wbudowany sterownik hamulca oraz dwukanałowe bezpieczeństwo (safety-STO). Łatwa diagnostyka dzięki dużemu czytelnemu ekranowi. SC6/SI6 natomiast są kompaktowej budowy, posiadają wbudowaną komunikację Profinet oraz EtherCAT, wejścia cyfrowe, sterowanie hamulcem. Mogą sterować silnikami LeanMotor, które są silnikami serwo bez fizycznego enkodera. Pozycja oraz prędkość obliczane na podstawie modelu matematycznego oraz pomiarów prądu w falowniku. Wszystkie opisywane serwonapędy mogą również sterować silnikami serwo czy asynchronicznymi. Oprogramowanie DS6 jest darmowe posiada wiele rozbudowanych funkcji, również dodatkowy poziom programowania graficznego. Poziom ten daje możliwość zaprogramowania np. licznika czy innej funkcji nie dostępnej w podstawowym wizzardzie.
Oprogramowanie DS6, które jest dedykowane do programowania serwonapędów SD6, SC6/SI6 firmy #Stober cały czas jest rozwijane i udoskonalane. W przypadku złożonych aplikacji zawsze jest możliwość konsultacji w celu doradztwa technicznego przez firmę Demero. Szczegółowo rozpisane komendy można znaleźć w instrukcji Motion commands (V 6.5-H or higher) ID 443349.
443349-motion-commands-en.pdf – Instrukcja obsługi komend ruchu plcopen w serwonapędach firmy Stober