Application for Winder on Stober Servo Drives
The motor controllers SC6, SI6, and SD6 by Stober are programmed using the Drive Control Suite (DS6) tool. Each successive version of this program introduces new features and capabilities. Starting from version 6.5.H, the Drive Based Center Winder application is available. This article outlines the general functions of this application and provides a step-by-step guide for configuring a drive project in various operating modes
Drive Based Center Winder Application in Stober Servo Drives
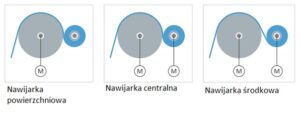
The Drive Based Center Winder application enables various winding scenarios, such as winding, unwinding, or rewinding materials like plastics, wires, textiles, or paper. It controls tension force using motion command 30: MC_Winder. Different winding processes can be implemented using this application. In a central winder system, the roll is driven by a central shaft, which is connected to a winder reel where the material is either wound or unwound.
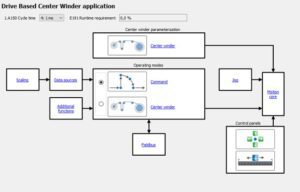
The DS6 software includes the Drive Based Center Winder application, providing versatile drive-based motion control solutions for single- and dual-axis SD6, SC6, and SI6 series controllers. These support position, speed, and torque/force control. Motion commands related to these control types are divided into two operating modes: Center Winder Mode and Command Mode. Additional features for monitoring process variables, such as positions or speeds, enhance process oversight.
Initial Setup of a New Project
-
Project Creation:
Upon starting, a wizard guides you through the setup process. Select the appropriate servo drive type and size, optional extension cards, and safety functions. Then, choose the motor types and sizes. -
Axis Configuration and Scaling:
Define the axis type and scaling. After scaling, set limits for speed and acceleration, configure limit sensors, and choose the homing method. Determine interaction methods with the drive/controller. -
Project Storage and Testing:
Save the project to the servo drive and perform manual test runs. If the drive reports no issues, proceed to configure the Drive Based Center Winder application.
Center Winder Mode
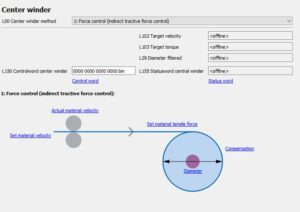
This mode focuses on motion command 30: MC_Winder, essential for winding operations. It utilizes predefined material speed and tension force values for applications like winding, unwinding, or rewinding materials. The drive controllers are activated via a communication bus or a combination of the bus and digital/analog input signals.
Steps to Configure Center Winder Mode:
-
Enable Center Winder Mode.
-
Parameterize the source for reel diameter (via a calculator or sensor).
-
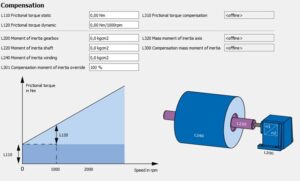
Compensate for friction and optionally axis mass inertia.
-
Set material speed and override motor speed.
-
Configure actual material speed and tension force.
For consistent winding results, define and compensate for static and dynamic frictional torque. Conduct tests for material speed and define a time constant for the material speed setpoint filter, if needed.
Command Mode
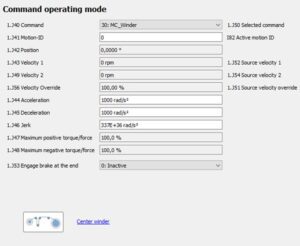
In this mode, motion profiles are sent from the PLC to the drive controller using motion commands. These include PLCopen-compliant commands, defining basic axis motion methods. Associated motion variables specify speed, acceleration, and deceleration, allowing the drive controller’s motion kernel to calculate motion profiles.
Steps to Configure Command Mode:
-
Enable Command Mode.
-
Parameterize the Center Winder.
-
Define reel diameter source (via a calculator or sensor).
-
Compensate for friction and optionally axis mass inertia.
-
Set material speed and override motor speed.
-
Configure actual material speed and tension force.
-
Optionally, limit torque/force based on the operating mode.
-
Define command-specific motion variables.
-
Set start signal sources.
-
Optionally, set continuation signal sources.
Commands selected in parameter J40 can only be initiated with an execute signal. If a motion command is interrupted (e.g., due to a safety trigger), the software checks if the motion can later be resumed and completed using a continuation function.
Further Reading and Support
This article is based on the Drive Based Center Winder application manual (ID 443346.01). The manual is available at Stober Downloads. For additional information, visit www.demero.pl or contact biuro@demero.pl.
Document Reference:
443346_01_HB_Drive_Based_Center_Winder_en.pdf – User Manual for the Drive Based Center Winder Application in Stober Servo Drives